DEAM LAB PARTNERS FROM FLORIDA INTERNATIONAL UNIVERSITY PRESENT SEMINAR ON DIGITAL TWINS & ARTIFICIAL INTELLIGENCE IN MARINE ROBOTICS AT THE MEES SPRING 2025 SEMINAR SERIES – MARCH 27, 2025
Please join us on Thursday, March 27, 2025 from 11:30-12:30 as we welcome and listen to two professors from Florida International University (Miami, FL), Dr. Tero Kaarlela and Dr. Leonardo Bobadilla, hosted by Dr. Jose Outeiro. Dr. Kaarlela and Dr. Bobadilla will be talking about: Overcoming Sensing, Communication, and Uncertainty Challenges in Marine Robotics Using Digital Twins and Artificial Intelligence.
Abstract
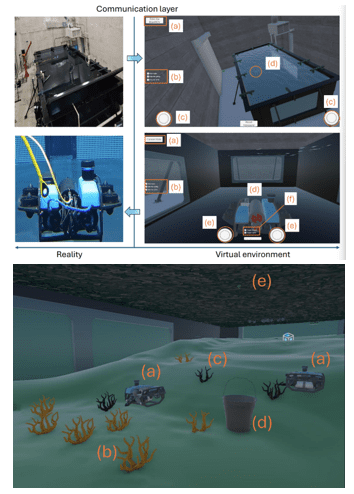
Several essential domains of robotics and autonomous vehicles, such as surveillance, planetary exploration, oceanic monitoring, automated construction, and search and rescue, require filtering and planning for robots in scenarios where communication, sensing, and uncertainty modeling are difficult. In this talk, we will discuss our progress and experiments with collaborators in addressing these issues in
four directions: 1) new limited-communication coordination approaches that can work in extremely low-bandwidth conditions; 2) an approach to localize and navigate using features of naturally occurring scalar field; 3) a digital twin that enables remote, device-independent access for operating an underwater robot for educational, scientific, and industrial applications; and 4) A sim-to-real approach that uses the developed digital twin to train Reinforcement Learning models to solve underwater coastal conservation tasks.
Dr. Tero Kaarlela is a Postdoctoral Research Associate at the Florida International University. His fields of expertise are robotics and information technology, including wireless networks, electromagnetic compatibility, simulation, digital twins, cybersecurity, and virtual reality. Before his academic career, he worked in industrial production management and planning for 20 years.

Dr. Leonardo Bobadilla is currently an Associate Professor at the Knight Foundation School of Computing and Information Sciences (KFSCIS), College of Engineering and Computing at Florida International University (FIU). He received his Ph.D. in Computer Science from the University of Illinois at Urbana-Champaign in 2013. He is interested in understanding the information requirements for solving fundamental robotics tasks such as navigation, patrolling, tracking, and motion safety. He has published over 70 peer-reviewed journal articles and conference papers in Robotics, Control, and Oceanic Engineering. The ARL, ARPA-E, DoD, NSF, ONR, DHS, FDEP, and the Ware Foundation have sponsored his research.